Create a classic wind-up toy out of the Rover. The Rover records the number of seconds it’s held upside down, and when placed right way up it will move forward. The longer it was held upside down, the longer and faster it will move. For more interesting wind-up Rovers, incorporate the LEDs and buzzer to respond to the wind-up time.
Setup
The only requirement is a long enough space for the Rover to move in. If you have limited space, add a cap to the wind-up time.
Our Approach
Stage 1: Set Up the Wind-up Variable
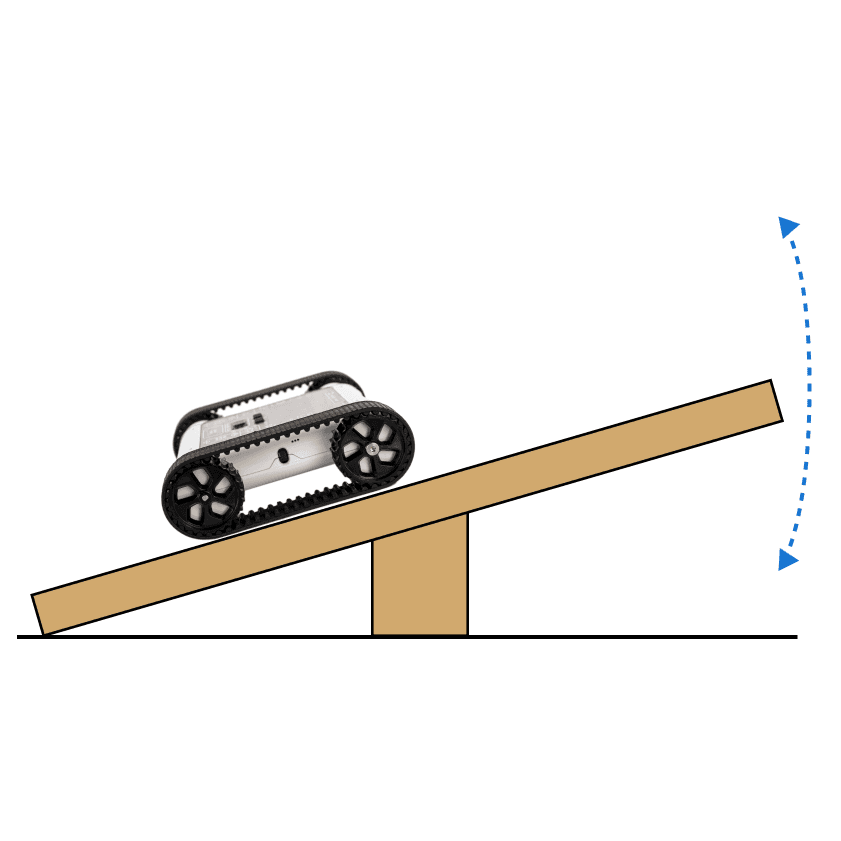
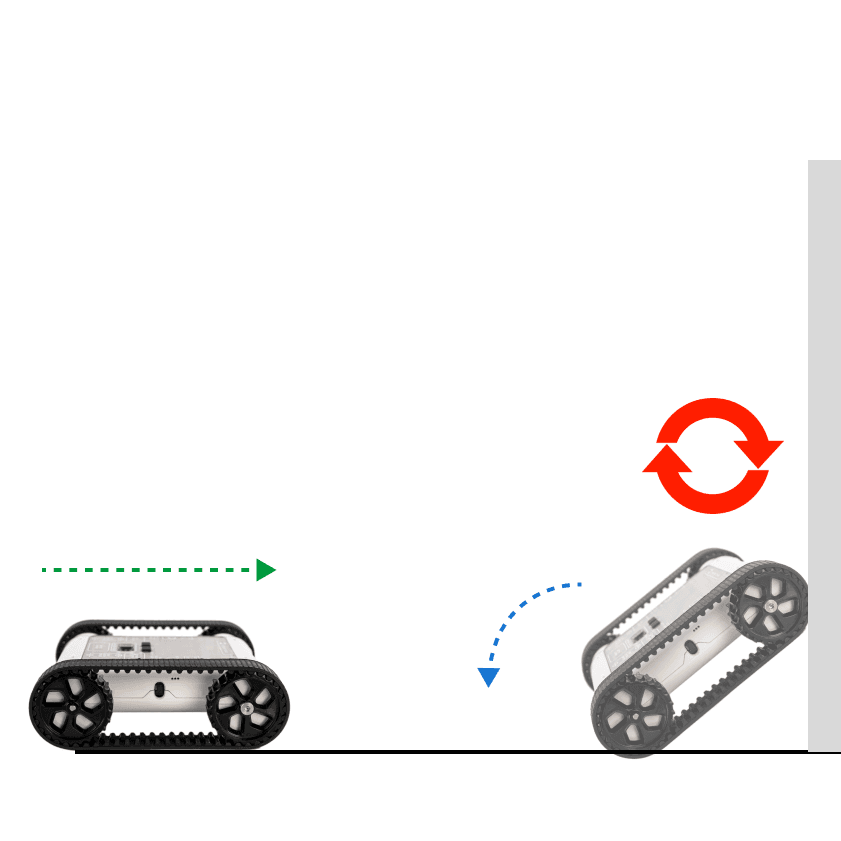
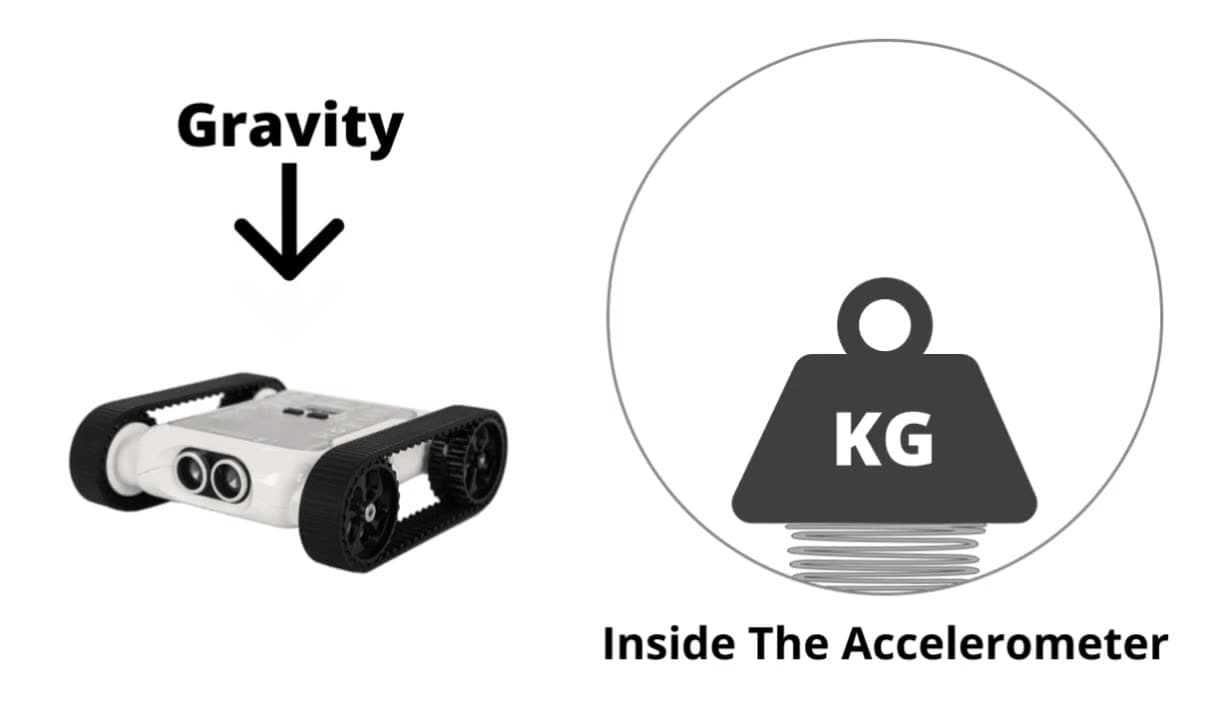
Create a variable for the wind-up time, then a While True loop so the wind-up and unwind code repeats. Inside the loop, add an IF statement that checks whether the Rover is upside down.
Stage 2: Wind Up When Upside Down
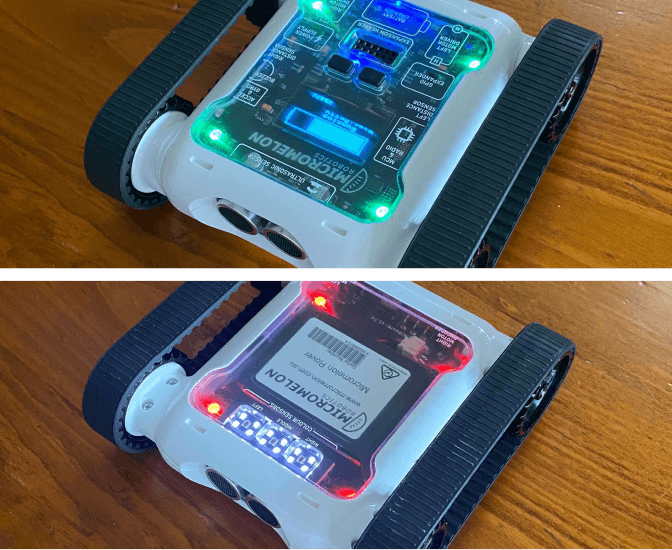
When the Rover is upside down, set all LEDs red and begin increasing the wind-up time. Add 1 to the variable and delay for 1 second, this means the wind-up time increases by 1 each second.
Stage 3: Unwind When Right Way Up
When the Rover is right way up and the wind-up time is greater than zero, enter the unwinding branch. Set the LEDs green, then run your sound and motor commands (feel free to be creative here). Decrease the wind-up time by 1 and delay. Once it reaches 0, enter the ELSE branch and turn everything off.
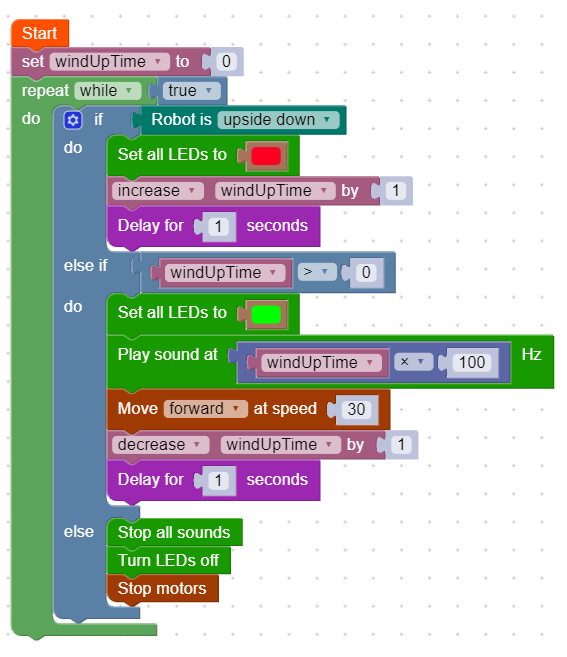
Example code, wind-up Rover with accelerometer-driven state machine