Sometimes it’s useful to remote-control your Micromelon Rover through difficult terrain or obstacles to see what the sensors see. This helps students design algorithms that make better use of the different sensors on the Rover.
In this guide we’ll go through how to use the Rover View in the Micromelon Code Editor to remote-control your Rover and get back useful sensor information.
To access the Rover View, first connect the Rover to the computer via the Code Editor, then click the ROVER button with the Rover icon next to the bot name.
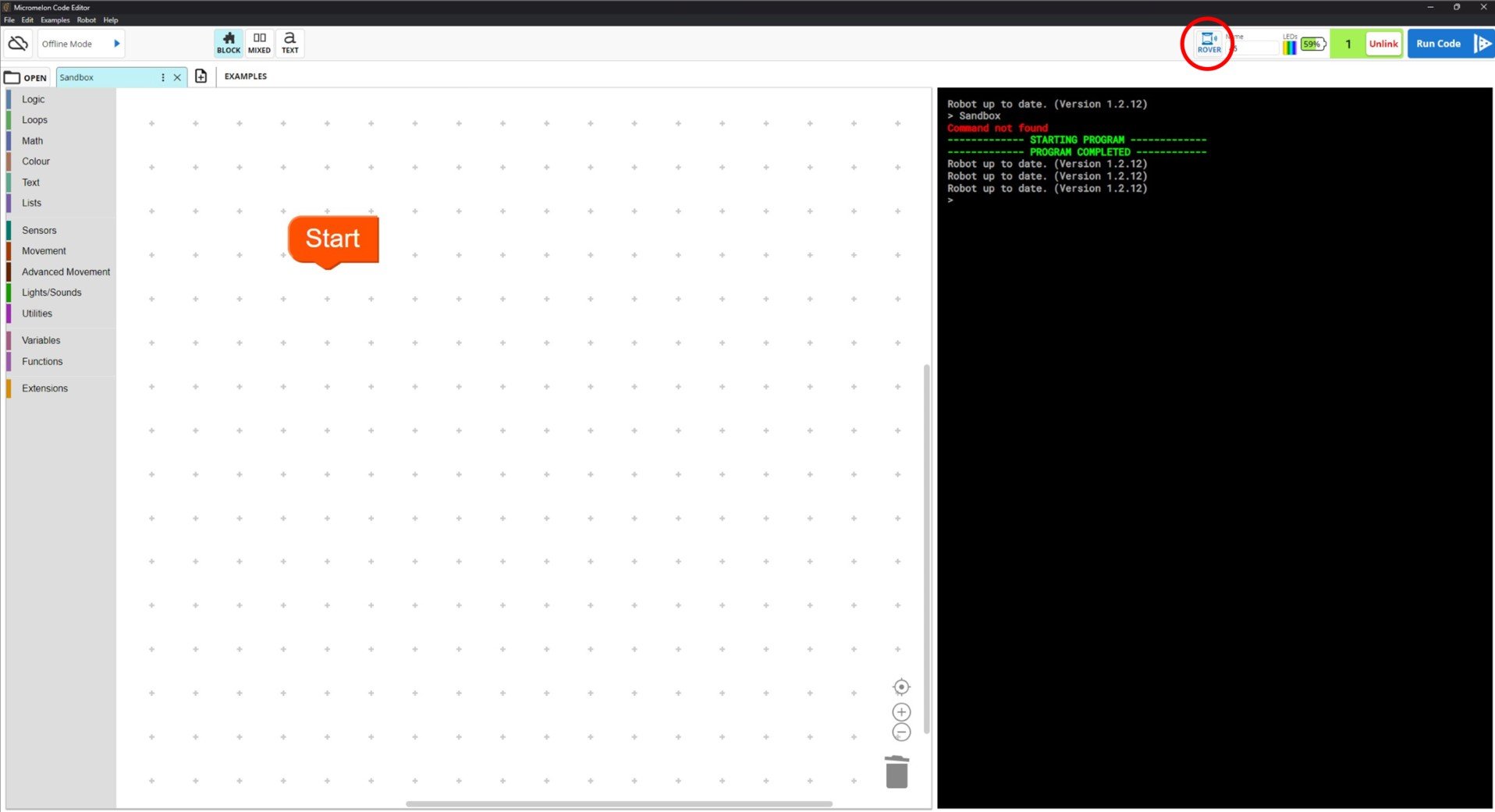
Opening the Rover View from the Code Editor
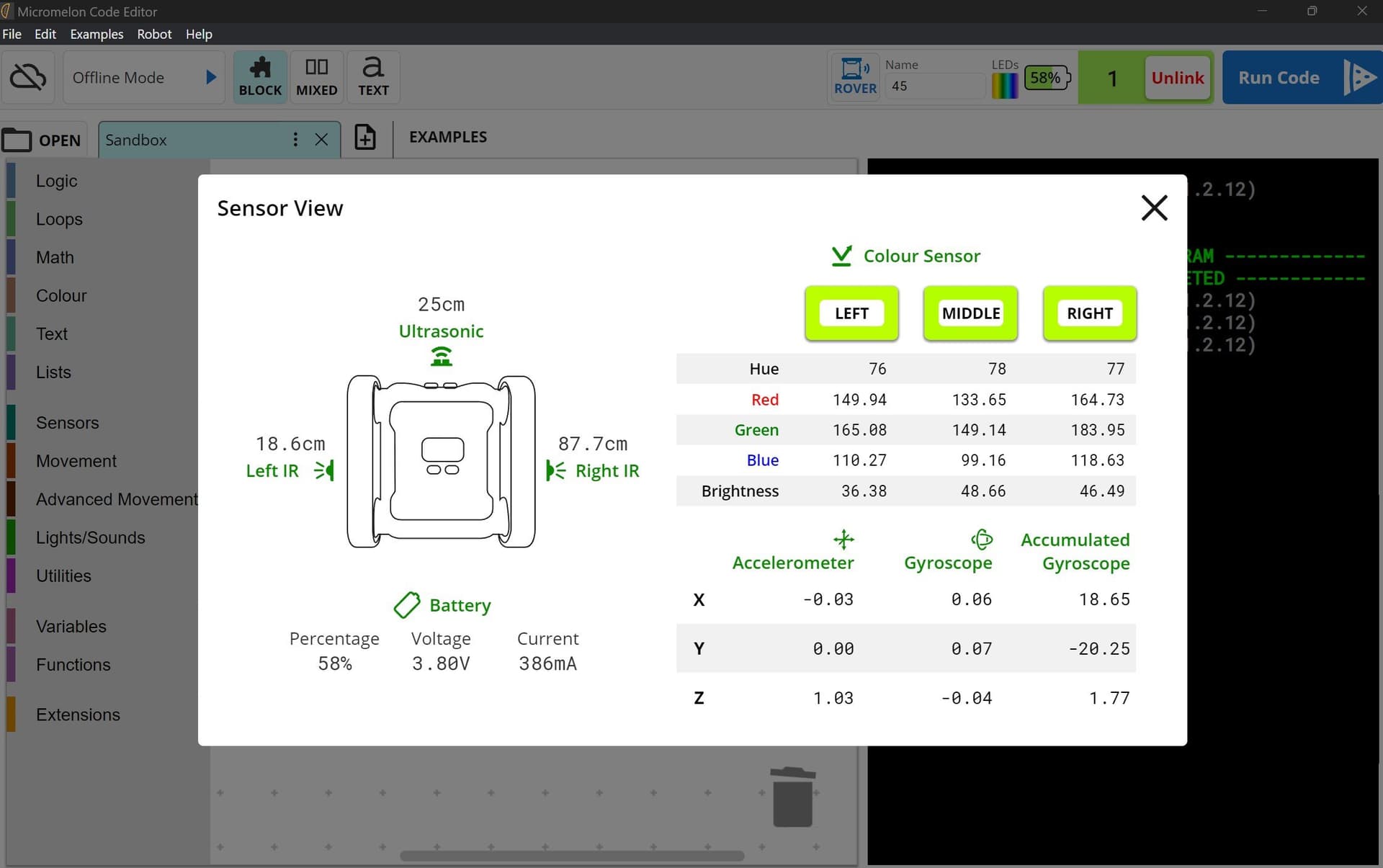
When clicked, this view appears, showing all the incoming information from the Rover:
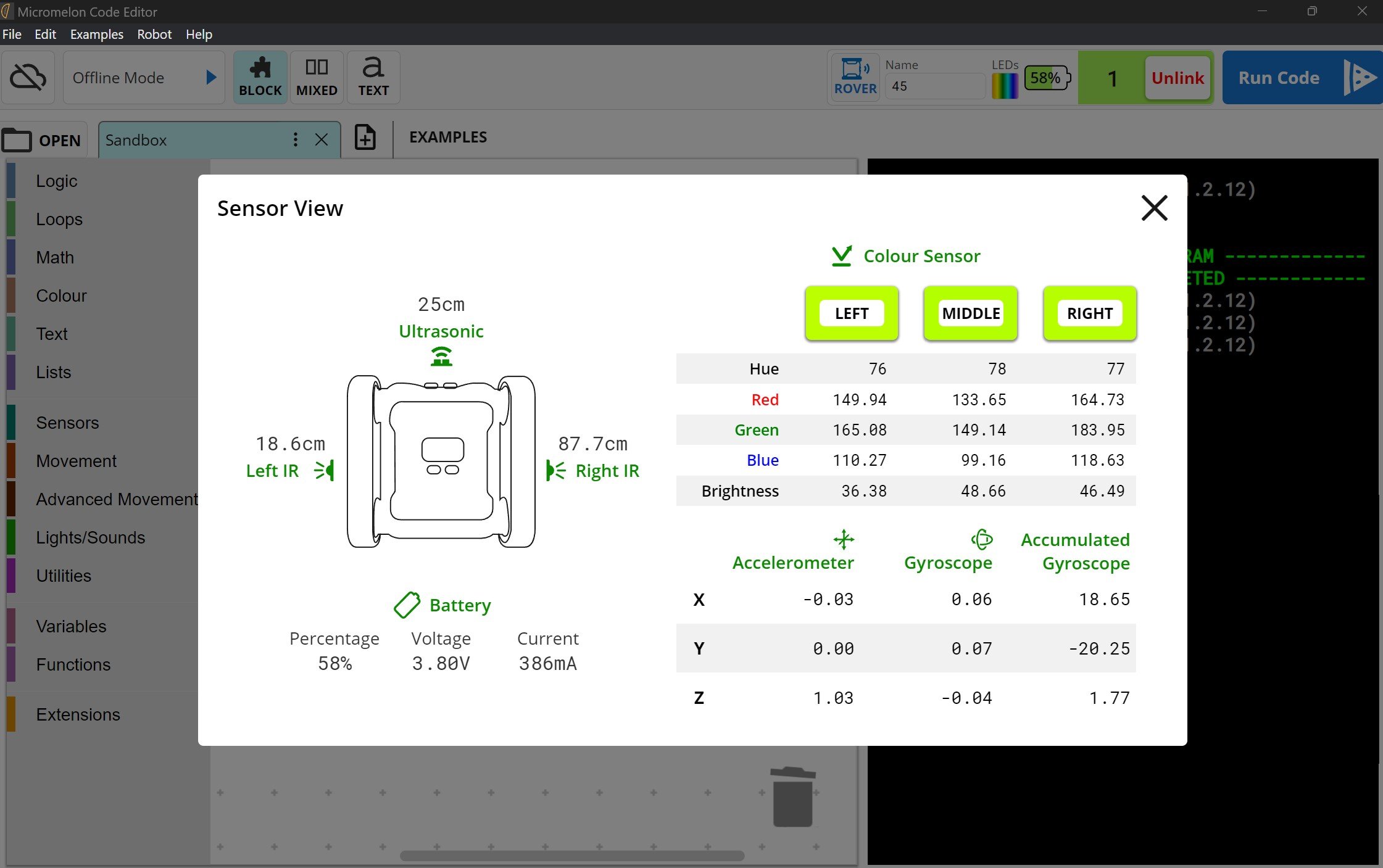
The Rover View showing live sensor data
Keyboard Controls
The keyboard layout for controlling the Rover.
When servos are being controlled, Decrease reduces the respective servo by 5°. Repeatedly pressing Decrease will eventually set the servo to −90°, equivalent to setting it in the Code Editor. When the Rover View is first opened, both servos are set to 90° but will only physically move to that position once one of the servo buttons has been pressed.
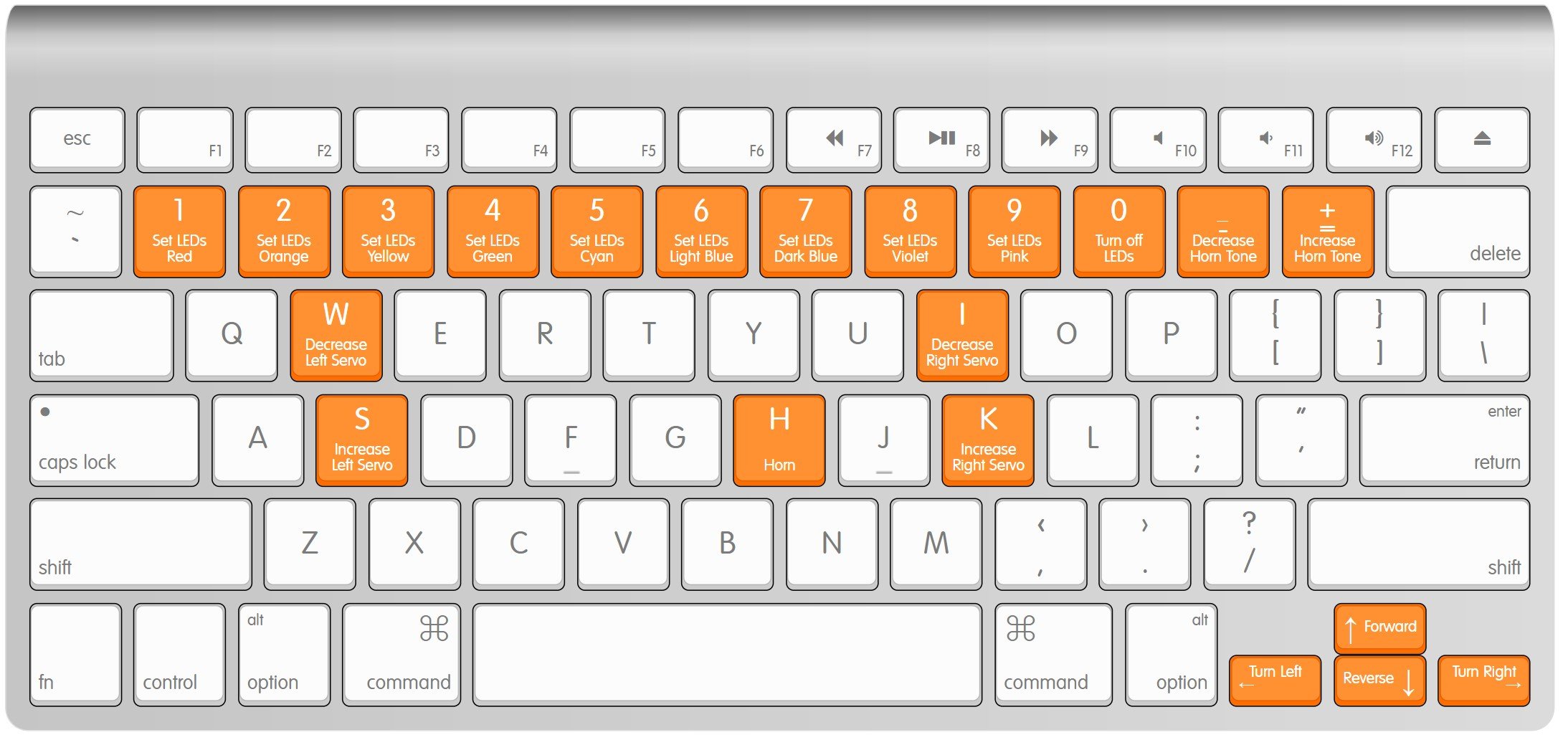
Keyboard layout for Rover remote control
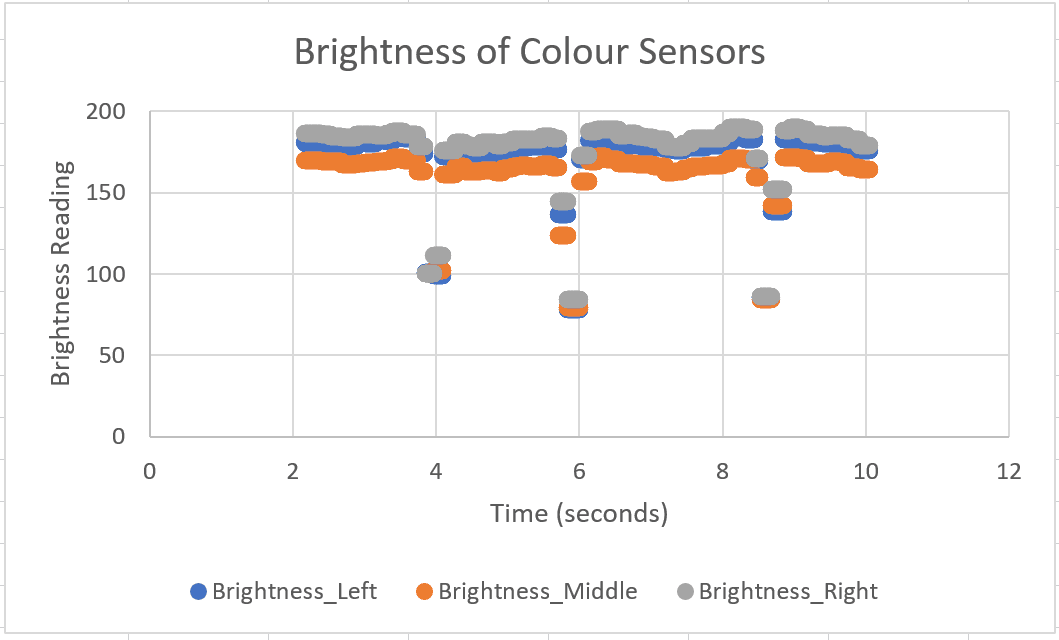
Sensors
The Rover View shows a Sensor View when opened. This gives live information from all the Rover sensors, useful for debugging and testing how each sensor works.
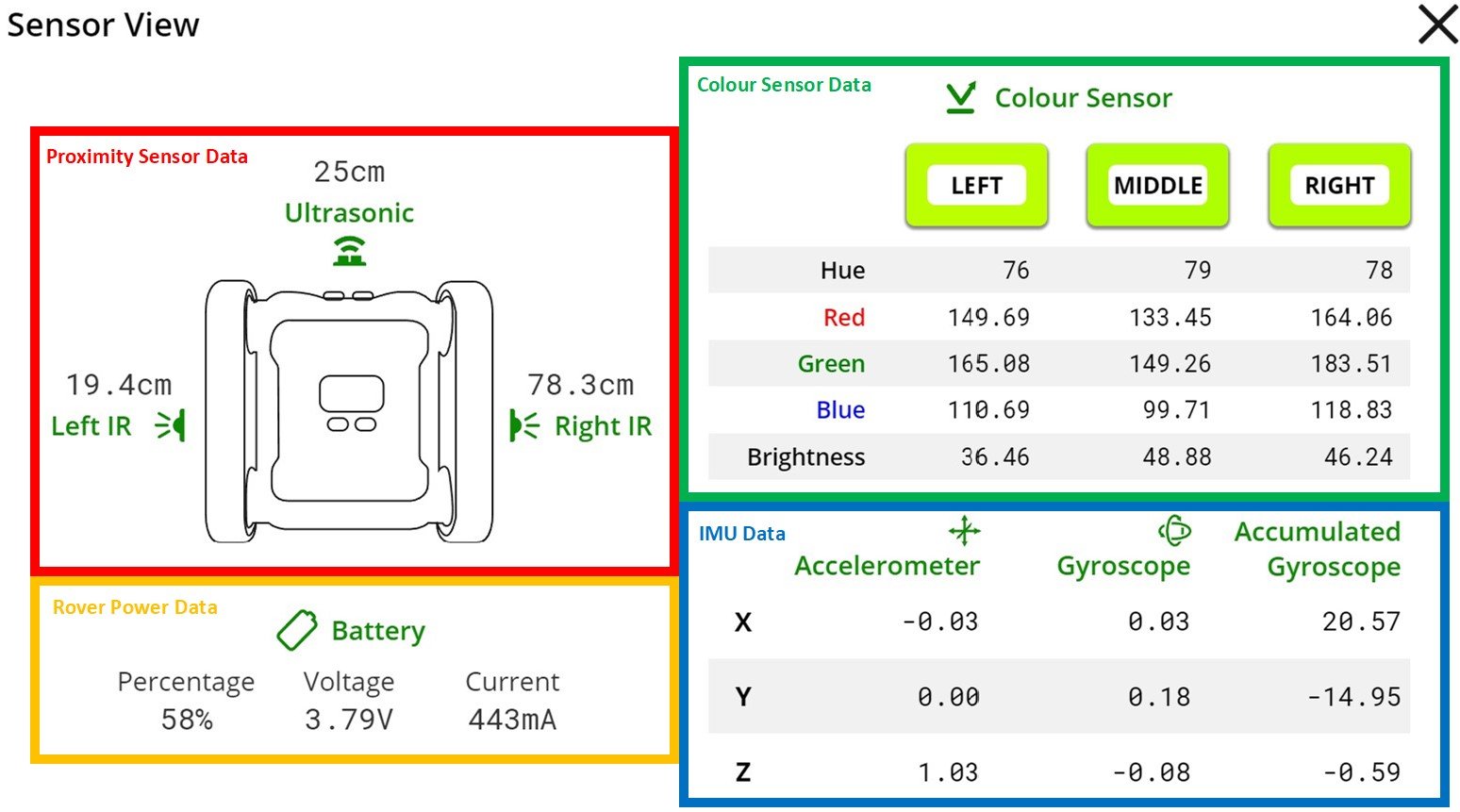
Sensor View, labelled groups of sensor data
To learn how each of the sensors work and what the values mean, see the dedicated sensor guides.