Program the Rover to detect if it’s upside down. When the Rover is right way up, set its LEDs to green; when upside down, set them to red. The Rover should change the LEDs as soon as it detects a change in orientation, without needing to press play again to trigger a change.
Setup
All you need is a flat, uniform surface to drive on. Different surfaces have different friction properties, so the tracks will slip differently depending on where the Rover is. Some movement blocks (like Turn by Degrees) are calibrated for an average friction, on other surfaces you may need to turn more or less to get the desired angle.
Our Approach
Stage 1: IF the Rover is Upright
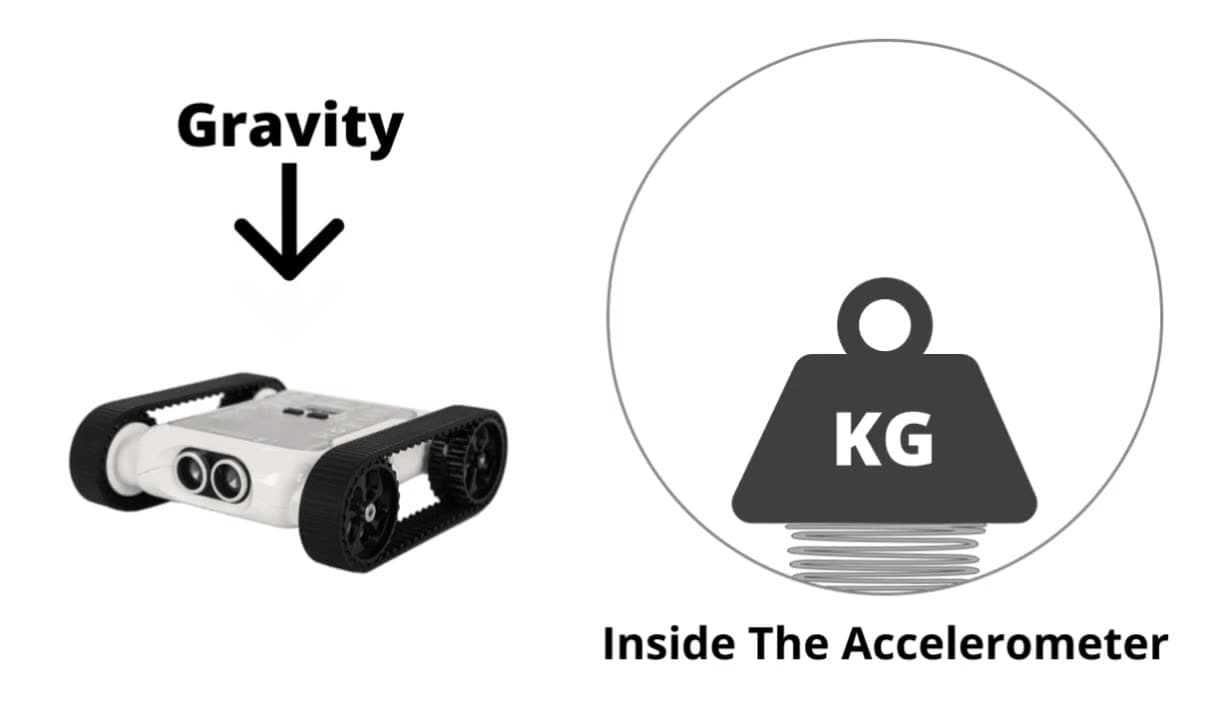
Start with an IF statement. Make the condition the sensor block that checks if the Rover is the right way up.
Stage 2: Change the LEDs
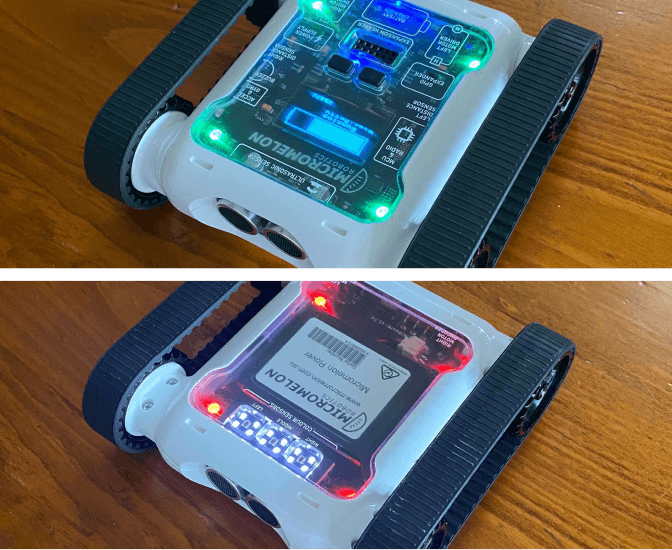
If the condition is true (Rover is right way up), use a Set All LEDs block and make all the LEDs green. If false (upside down), use the ELSE branch to set all LEDs to red.
Stage 3: Loop Forever
If you run with just an IF statement, it will check once and end. Wrap the whole IF in a While True loop so the Rover continuously checks orientation and updates the LEDs.
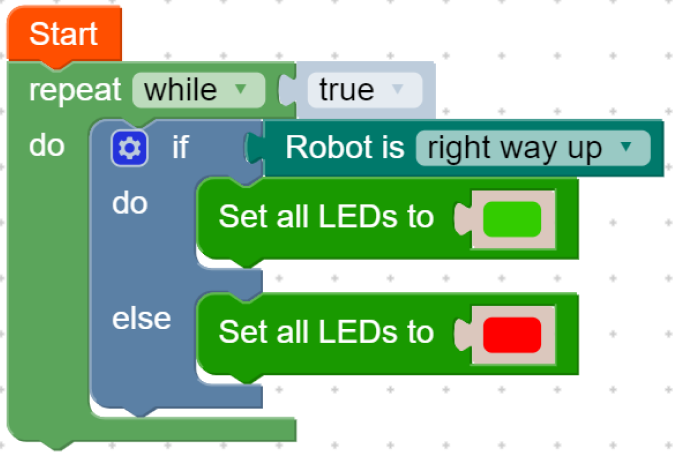
Example code, orientation-driven LEDs